小说语音阅读器(听小说)
小说语音阅读器一个功能丰富的小说阅读与语音朗读应用,支持多小说源搜索、章节内容获取、文本转语音等功能。 界面展示小说获取界面: 我的书架界面: 语音朗读界面: 功能特点多小说源支持 得奇小说网 (deqixs.co) - 支持搜索和章节获取 小说阅读网 (xiaoshuoyuedu.com) - 支持搜索和章节获取 可扩展架构,方便添加更多小说源 语音朗读 使用 Edge-TTS 高质量语音合成 多种中文语音选择(晓晓、云希等) 可调节语速(0.5x - 2.0x) 音频文件自动缓存,避免重复生成 阅读功能 章节列表导航 自动播放下一章 播放进度控制 暂停/继续播放 上一章/下一章切换 书架管理 自动保存已加载的小说 记住上次阅读位置 快速访问历史小说 文件结构123456789101112op_reader/├── config.py # 配置文件(语音映射、目录设置等)├── utils.py # 工具函数├── novel_base.py # 小说源抽象基类├──...

MyBoy桌面养成式男孩
MyBoy桌面养成式男孩简介这是一个使用Python和Tkinter库开发的桌面养成式男孩应用程序。用户可以通过喂食、工作和休息来照顾一个虚拟的小男孩。应用程序还包括倒计时提醒,提升用户体验。人生模拟,有六维属性,用户可以通过与虚拟男孩的互动来管理和发展他的属性。同时,应用程序还提供了重生功能,用户可以在虚拟男孩死亡后重新开始。 Github:https://github.com/ylm1379239710/MyBoy 功能 六维属性 投喂 购买 工作 零工 运动 学习 休息 倒计时提醒 重生 界面 安装1pip install -r requirements.txt 打包1pyinstaller .\MyBoy.spec 运行将项目里的configs文件夹和images文件夹复制后 与生成的可执行文件放在同一目录下,然后运行exe即可
基于CLIP-ReID和YOLOv8的行人检测与重识别系统
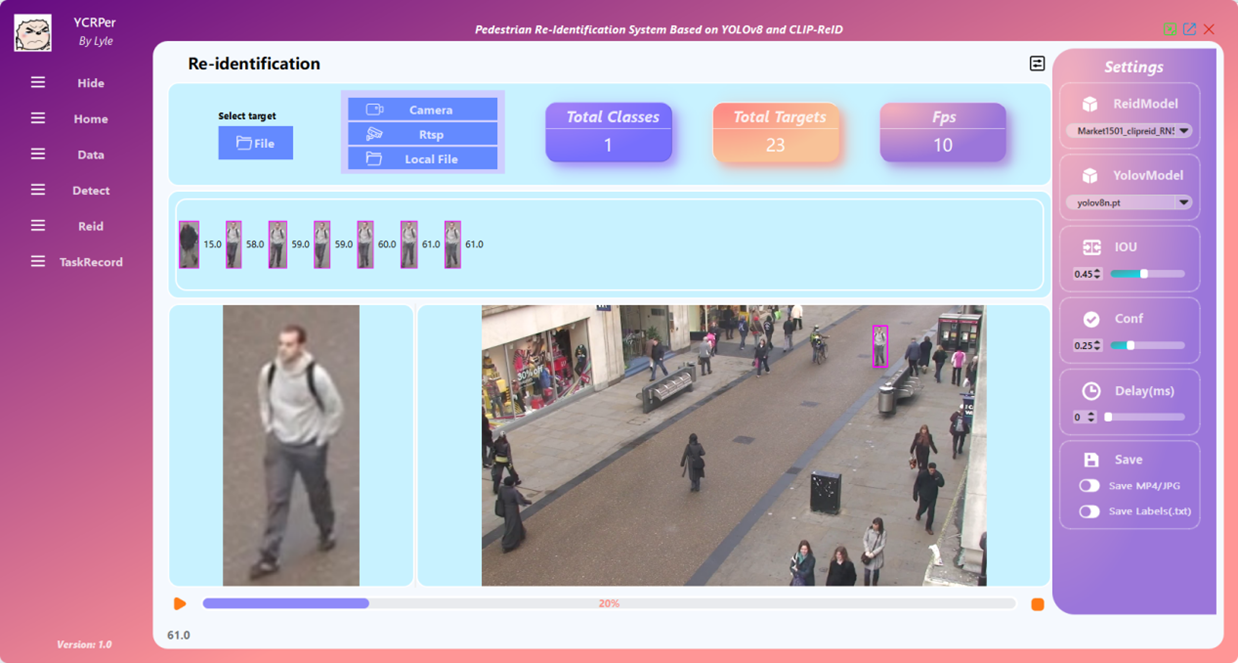
YPCRer — Pedestrian Re-Identification System Based on YOLOv8 and CLIP-ReID 📚 项目简介YPCRer 是在 YoloSide v2 项目基础上进行的再开发,在原有的目标检测功能上进行改动。引入CLIP-ReID,新增了数据管理(增删改查)、行人重识别和任务记录功能。此次项目是为了学习目标检测和重识别技术,同时学习使用了QT的Pyside6进行桌面应用开发。我也有相关的资料可以找我QQ:1379239710。 Github:https://github.com/ylm1379239710/YOLOv8-PySide6-CLIP-REID ✏️ 参考项目链接CLIP-ReID 项目源码链接: Github:https://github.com/Syliz517/CLIP-ReID 界面功能等参考链接: Github:https://github.com/Jai-wei/YOLOv8-PySide6-GUI B站:YoloSide V2.0 ~ yolov8 pyside6 可视化界面 gui...
(C++)提高编程
C++提高编程 本阶段主要针对C++==泛型编程==和==STL==技术做详细讲解,探讨C++更深层的使用 1 模板1.1 模板的概念模板就是建立通用的模具,大大提高复用性 例如生活中的模板 一寸照片模板: PPT模板: 模板的特点: 模板不可以直接使用,它只是一个框架 模板的通用并不是万能的 1.2 函数模板 C++另一种编程思想称为 ==泛型编程== ,主要利用的技术就是模板 C++提供两种模板机制:函数模板和类模板 1.2.1 函数模板语法函数模板作用: 建立一个通用函数,其函数返回值类型和形参类型可以不具体制定,用一个虚拟的类型来代表。 语法: 12template<typename T>函数声明或定义 解释: template — 声明创建模板 typename — 表面其后面的符号是一种数据类型,可以用class代替 T — ...
(C++)核心编程
C++核心编程本阶段主要针对C++==面向对象==编程技术做详细讲解,探讨C++中的核心和精髓。 1 内存分区模型C++程序在执行时,将内存大方向划分为4个区域 代码区:存放函数体的二进制代码,由操作系统进行管理的 全局区:存放全局变量和静态变量以及常量 栈区:由编译器自动分配释放, 存放函数的参数值,局部变量等 堆区:由程序员分配和释放,若程序员不释放,程序结束时由操作系统回收 内存四区意义: 不同区域存放的数据,赋予不同的生命周期, 给我们更大的灵活编程 1.1 程序运行前 在程序编译后,生成了exe可执行程序,未执行该程序前分为两个区域 代码区: 存放 CPU 执行的机器指令 代码区是共享的,共享的目的是对于频繁被执行的程序,只需要在内存中有一份代码即可 代码区是只读的,使其只读的原因是防止程序意外地修改了它的指令 全局区: 全局变量和静态变量存放在此. 全局区还包含了常量区,...
(C++)基础入门
C++基础入门1 C++初识1.1 第一个C++程序编写一个C++程序总共分为4个步骤 创建项目 创建文件 编写代码 运行程序 1.1.1 创建项目 Visual Studio是我们用来编写C++程序的主要工具,我们先将它打开 1.1.2 创建文件右键源文件,选择添加->新建项 给C++文件起个名称,然后点击添加即可。 1.1.3 编写代码1234567891011#include<iostream>using namespace std;int main() { cout << "Hello world" << endl; system("pause"); return 0;} 1.1.4 运行程序 1.2 注释作用:在代码中加一些说明和解释,方便自己或其他程序员程序员阅读代码 两种格式 单行注释:// 描述信息 通常放在一行代码的上方,或者一条语句的末尾,==对该行代码说明== 多行注释: /* 描述信息...
(ROS)第4章 ROS运行管理
第4章 ROS运行管理ROS是多进程(节点)的分布式框架,一个完整的ROS系统实现: 可能包含多台主机; 每台主机上又有多个工作空间(workspace); 每个的工作空间中又包含多个功能包(package); 每个功能包又包含多个节点(Node),不同的节点都有自己的节点名称; 每个节点可能还会设置一个或多个话题(topic)… 在多级层深的ROS系统中,其实现与维护可能会出现一些问题,比如,如何关联不同的功能包,繁多的 ROS节点应该如何启动?功能包、节点、话题、参数重名时应该如何处理?不同主机上的节点如何通 信? 4.1 ROS元功能包 场景 完成ROS中一个系统性的功能,可能涉及到多个功能包,比如实现了机器人导航模块,该模 块下有地图、定位、路径规划…等不同的子级功能包。那么调用者安装该模块时,需要逐一的安装 每一个功能包吗? 显而易见的,逐一安装功能包的效率低下,在ROS中,提供了一种方式可以将不同的功能包打包成一个 功能包,当安装某个功能模块时,直接调用打包后的功能包即可,该包又称之为元功能包...
(ROS)第3章 ROS通信机制进阶——常用API
第3章 ROS通信机制进阶——常用API3.1 常用API首先,建议参考官方API文档或参考源码: ROS节点的初始化相关API; NodeHandle 的基本使用相关API; 话题的发布方,订阅方对象相关API; 服务的服务端,客户端对象相关API; 时间相关API; 日志输出相关API。 另请参考 http://wiki.ros.org/APIs https://docs.ros.org/en/api/roscpp/html/ 3.1.1 初始化C++初始化 12345678910111213141516/** @brief ROS初始化函数。 * * 该函数可以解析并使用节点启动时传入的参数(通过参数设置节点名称、命名空间...) * * 该函数有多个重载版本,如果使用NodeHandle建议调用该版本。 * * \param argc 参数个数 * \param argv 参数列表 * \param name 节点名称,需要保证其唯一性,不允许包含命名空间 * \param options...
(ROS)第2章 ROS通信机制——参数服务器
第2章 ROS通信机制——参数服务器2.3 参数服务器参数服务器在ROS中主要用于实现不同节点之间的数据共享。参数服务器相当于是独立于所有节点的一个公共容器,可以将数据存储在该容器中,被不同的节点调用,当然不同的节点也可以往其中存储数据。 关于参数服务器的典型应用场景如下:导航实现时,会进行路径规划,比如:全局路径规划,设计一个从出发点到目标点的大致路径。本地路径规划,会根据当前路况生成时时的行进路径。 上述场景中,全局路径规划和本地路径规划时,就会使用到参数服务器:路径规划时,需要参考小车的尺寸,我们可以将这些尺寸信息存储到参数服务器,全局路径规划节点与本地路径规划节点都可以从参数服务器中调用这些参数参数服务器,一般适用于存在数据共享的一些应用场景。 概念:以共享的方式实现不同节点之间数据交互的通信模式。 作用:存储一些多节点共享的数据,类似于全局变量。 2.3.1参数服务器理论模型参数服务器实现是最为简单的,该模型如下图所示,该模型中涉及到三个角色: ROS Master (管理者) Talker (参数设置者) Listener (参数调用者) ROS...
(ROS)第2章 ROS通信机制——常用命令与通信机制比较
第2章 ROS通信机制——常用命令与通信机制比较2.4 常用命令机器人系统中启动的节点少则几个,多则十几个、几十个,不同的节点名称各异,通信时使用话题、服 务、消息、参数等等都各不相同,一个显而易见的问题是: 当需要自定义节点和其他某个已经存在的节 点通信时,如何获取对方的话题、以及消息载体的格式呢? 在 ROS 同提供了一些实用的命令行工具,可以用于获取不同节点的各类信息,常用的命令如下: rosnode : 操作节点 rostopic : 操作话题 rosservice : 操作服务 rosmsg : 操作msg消息 rossrv: 操作srv消息 rosparam : 操作参数 作用 和之前介绍的文件系统操作命令比较,文件操作命令是静态的,操作的是磁盘上的文件,而上述命令是 动态的,在ROS程序启动后,可以动态的获取运行中的节点或参数的相关信息。 2.4.1 rosnoderosnode 是用于获取节点信息的命令 123456rosnode ping 测试到节点的连接状态rosnode list 列出活动节点rosnode info ...
公告
Hey,欢迎来到我的博客!
00后程序员一枚,喜欢折腾。
QQ:1379239710
欢迎一起交流玩耍。

00后程序员一枚,喜欢折腾。
QQ:1379239710
欢迎一起交流玩耍。